Среди множества приборов, предназначенных для коммутации, управления и выполнения других функций хочется отметить ПИД-регулятор, используемый в цепях обратной связи. Он устанавливается в системы с автоматическим управлением и поддерживает на определенном уровне значение какого-либо параметра. В большинстве случаев ПИД-регулятор участвует в регулировке температурных режимов и других величин, участвующих в различных процессах.
Общие сведения о ПИД-регуляторе
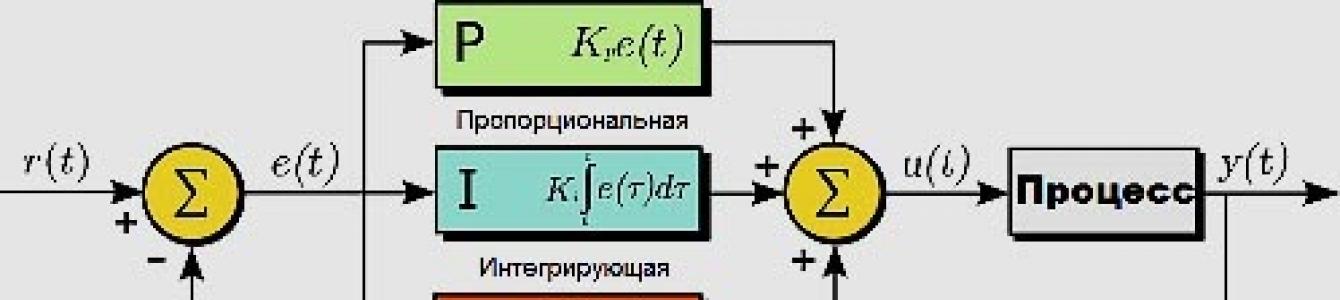
Аббревиатура ПИД происходит от английского понятия PID, и расшифровывается как Proportional, Integral, Derivative. На русском языке это сокращение включает в себя три компонента или составляющие: пропорциональную, интегрирующую, дифференцирующую.
Принцип работы ПИД-регулятора наилучшим образом подходит для контуров управления, схема которых оборудована звеньями обратной связи. В первую очередь, это различные автоматические системы где формируются сигналы управления, обеспечивающие высокое качество и точность переходных процессов.
В состав управляющего сигнала ПИД-регулятора входят три основных компонента, складывающиеся между собой. Каждый из них находится в пропорции с определенной величиной:
- Первый - с сигналом рассогласования.
- Второй - с интегралом сигнала рассогласования.
- Третий - с производной сигнала рассогласования.
Если какой-либо компонент выпадет из этого процесса, то данный регулятор уже не будет представлять собой ПИД. В этом случае его схема будет просто пропорциональной, пропорционально-дифференцирующей, пропорционально-интегрирующей.
Поскольку эти приборы чаще всего используются для поддержания заданного уровня температуры, в том числе для чайников, целесообразно ПИД-регулятор рассматривать на практических примерах именно в этом ракурсе.

В самом процессе будет участвовать объект, на котором должна поддерживаться заданная температура. Все регулировки осуществляются извне. Другой составляющей будет само устройство с микроконтроллером, которое непосредственно решает имеющуюся задачу. Через измеритель на контроллер поступают данные об уровне температуры на данный момент. Мощность нагревателя отдельно контролируется специальным устройством. Для того чтобы установить требуемое значение параметров температуры, микроконтроллер нужно подключить к компьютеру.
Таким образом, исходными данными служат следующие температурные показатели: текущее значение и уровень, до которого должен нагреться или остыть рассматриваемый объект. На выходе должна получиться величина мощности, передаваемой к нагревательному элементу. Именно она обеспечивает необходимый температурный режим, позволяющий выполнить поставленную задачу. Для ее решения будут задействованы все три компонента, рассмотренные выше.
Три составляющих рабочего процесса ПИД-регулятора
Формирование выходного сигнала осуществляет пропорциональная составляющая. Данный сигнал удерживает входную величину, подлежащую регулировке, на нужном уровне и не дает ей отклоняться. С повышением этого отклонения возрастает и уровень сигнала.
Если на входе регулируемая величина сравняется с заданным значением, то уровень выходного сигнала будет равен нулю. Однако на практике невозможно отрегулировать нужную величину с помощью лишь одной пропорциональной составляющей и стабилизировать ее на определенном уровне. Всегда существует вероятность статической ошибки, равной величине отклонения, поэтому стабилизация выходного сигнала останавливается на этом значении.

Данная проблема решается за счет использования второго, интегрирующего компонента. Его основным элементом является интеграл по времени, взятый от общей величины рассогласования. То есть, интегральная составляющая находится в пропорции с этим интегралом. Данный компонент способен ликвидировать статическую ошибку, так как регулятор постепенно накапливает учет статической погрешности.
Таким образом, при отсутствии внешних воздействий, через определенный период времени регулируемая величина будет приведена в стабильное состояние на отметке правильного значения. В этом случае величина пропорциональной составляющей будет нулевой, а интегрирующая полностью обеспечивает точность выходных данных. Однако и она может вызвать неточности, требующие исправления, в случае неправильного выбора коэффициента.
Эти отклонения устраняются за счет третьих - дифференциальных составляющих, пропорциональных с темпом изменяющегося отклонения величины. Она препятствует отклонениям, возможным в перспективе под влиянием задержек или внешних воздействий. Все три компонента дискретно связаны между собой.
Теория и практика использования ПИД-устройств
ПИД-регулятор температуры способен поддерживать заданное значение какой-то величины на протяжении определенного промежутка времени. С этой целью используется изменение напряжения и других величин, которые можно рассчитать по специальным формулам. При этом учитывается величина уставки и заданного значения, а также разница или рассогласование.
1.
2.
В идеальном варианте напряжение u задается с помощью формулы 1. В ней хорошо просматриваются коэффициенты пропорциональности ПИД-регулятора, предусмотренные для каждого компонента. На практике используется другая формула 2 с коэффициентом усиления, подходящим к любому из трех составляющих.
На практике ПИД-регулирование систем в теоретическом плане анализируются довольно редко. Это связано с недостатком информации о характеристиках регулируемого объекта, нелинейностью и нестабильностью всей системы, когда невозможно использовать дифференцирующий компонент.

Рабочий диапазон устройств, функционирующих на практике, обычно ограничивается верхним и нижним пределами. В связи с нелинейностью, каждая настройка выполняется экспериментально, при подключении объекта к системе управления.
Величина, образуемая с помощью программного алгоритма управления, имеет специфические особенности. Например, для нормальной регулировки температуры может потребоваться вместо одного сразу два прибора: один будет управлять нагревом, а другой - охлаждением. В первом случае осуществляется подача разогретого теплоносителя, а во втором - хладагента. Самым современным прибором считается цифровой ПИД-регулятор, воплотивший в своей конструкции все варианты практических регулировочных решений.
ПИ-регулятор является одним из наиболее универсальных регуляторов. Фактически ПИ-регулятор – это с дополнительной интегральной составляющей. И-составляющая, дополняющая алгоритм, в первую очередь нужна для устранения статической ошибки, которая характерна для пропорционального регулятора. По сути, интегральная часть является накопительной, и таким образом позволяет осуществить то, что ПИ-регулятор учитывает в данный момент времени предыдущую историю изменения входной величины. Если добавить к алгоритму дифференциальную составляющую - он трансформируется в .
ПИ-регулятор. Формула выходного сигнала:

- U(t) – выходной сигнал
- P – пропорциональная часть
- I – интегральная часть
- K – коэффициент пропорциональности
- Tи – постоянная интегрирования (время изодрома).
- ?(t) – сигнал рассогласования, разница между сигналом обратной связи и заданием (может быть заменен другими сигналами, в зависимости от структурной схемы системы, но суть та же.)
ПИ-регулятор. Передаточная функция:
W(p)= K(1+1/Tи*s) или W(p)= K+1/Tи*s;
Из формулы видно, что п-составляющая складывается с накопленной и-составляющей за время t. Фактически, ПИ-регулятор «учится» на предыдущем опыте. Если система не испытывает внешних возмущений – регулируемая величина стабилизируется на заданном значении: П-составляющая будет равняться 0, а интегральная составляющая полностью обеспечит выходной сигнал.
ПИ-регулятор можно получить – параллельным. Составим в MatLab схему из двух параллельно соединенных звеньев – к и 1/Ти. Дадим запаздывание в 1 секунду, чтобы увидеть выход в начальный момент времени.

Рассмотрим ПИ-регулятора. Переходная характеристика – реакция на единичное ступенчатое возмущение. Смоделируем в среде MatLab несколько переходных процессов для различных ситуаций.
- ПИ-регулятор. H(t).

С графика видно, что переходная характеристика ПИ-регулятора состоит из сложенных пропорциональной и интегральной. Чем больше к, тем больше будет пропорциональный заброс на графике.
- ПИ-регулятор. Влияние Ти.
Рассмотрим на примере нескольких Ти на ПИ-регулятор, его выход и вид переходного процесса. Смоделируем несколько параллельных процессов с выводом на один Scope с помощью Mux.
Регуляторы с линейным законом регулирования по математической зависимости между входными и выходными сигналами подразделяются на следующие основные виды:
- 1) П-регулятор (пропорциональный);
- 2) И-регулятор (интегральный);
- 3) ПИ-регулятор (пропорционально-интегральный (изодром- ный));
- 4) регуляторы с предварением (с опережением):
- ПД-регулятор (пропорционально-дифференциальный);
- ПИД-регулятор (пропорционально-интегрально-дифференциальный).
В системах автоматического регулирования наиболее распространенными являются П-регулятор, ПИ-регулятор, ПИД-регулятор.
В зависимости от задающего воздействия и параметров объекта регулирования подбирают регулятор с определенной характеристикой W p . Изменение W p адекватно ведет к изменению коэффициентов дифференциального уравнения общего передаточного звена (регулятор-объект), и тем самым достигается необходимое качество регулирования. В промышленных регуляторах эти величины называются параметрами настройки. Параметрами настройки являются: коэффициент усиления; зона нечувствительности; постоянная времени интегрирования; постоянная времени дифференцирования и т.д. Для изменения параметров настройки в регуляторах имеются органы настройки (управления) . Наиболее распространены регуляторы на один контур, но в настоящее время все больше появляется многоконтурных регуляторов. Такие регуляторы часто позволяют реализовать взаимосвязанное регулирование параметров.
Рассмотрим смысл закона регулирования регулятора на примере САР температуры целевого продукта в теплообменнике (рис. 3.9). Эта схема нам уже известна. Это САР по отклонению. Здесь а - сигнал рассогласования 90° - 100° = - 10°С =о. Закон регулирования регулятора (контроллера) определяет характер перемещения затвора регулирующего органа в новое положение. На место регулятора (контроллера) в данной схеме будем поочередно ставить линейные регуляторы и исследовать влияние регулирующего воздействия р от каждого закона регулирования на характер перемещения затвора регулирующего органа. Рассматриваем линейные регуляторы с идеальными характеристиками.
П-регулятор. Это регулятор, у которого ц пропорционально о, т.е. где К - коэффициент передачи (коэффициент усиления).

Рис. 3.9.
При скачке входной величины а на значение (минус 10°С) затвор регулирующего органа переходит в новое ц-положение скачком (рис. 3.10). Регуляторы, действующие по П-закону, просты по устройству и при эксплуатации надежны. Однако их характеризуют малое перестановочное усилие на регулирующем органе, низкая точность поддержания заданного параметра. Параметром настройки регулятора является коэффициент передачи К.

Рис 3.10.
Достоинство такого регулирования: регулирующий орган быстро перемещается на новое положение, т.е. высокая скорость регулирования. Недостаток: имеет место остаточное отклонение, т.е. имеет место некоторая ошибка регулирования (рис. 3.11). Поэтому П-ре- гуляторы применяются там, где нет строгого требования к точности регулирования.

Рис. 3.11.
И-регулятор.
Это регулятор, у которого ц пропорционально интегралу а:

При скачке входной величины на значение минус КТС затвор регулирующего органа медленно переходит в новое положение (рис. 3.12). Как бы ни было мало отклонение регулируемой величины от заданного значения, интегральный регулятор будет продолжать перемещать регулирующий орган вплоть до необходимого положения. Достоинство: отсутствие остаточного отклонения регулируемого параметра от заданного значения. Недостаток: низкая скорость регулирования, т.е. затвор в новое положение перемещается медленно.
ПИ-регулятор. Это параллельное соединение П- и И- регуляторов. ПИ-регулятор сочетает положительные моменты П- и И-регу- ляторов. ПИ-регулятор оказывает воздействие на регулирующий орган пропорционально отклонению и интегралу отклонения регулируемой величины. У ПИ-регулятора (рис. 3.13) регулирующее воздействие р перемещает затвор пропорционально отклонению параметра о и интегралу отклонения о.

Рис. 3.12.

Рис. 3.13.
где К (коэффициент усиления) и Т к (постоянная времени интегрирования) - параметры настройки регулятора.
Как видим, математическое выражение данного закона - это сумма двух предыдущих формул. Затвор регулирующего органа часть пути (а, б) пройдет скачком по П-закону, а оставшуюся часть (б, в) - медленно по И-закону.
Переходный процесс при пропорционально-интегральном регулировании (ПИ-регулировании) показан на рис. 3.14.
Регуляторы с предварением
П- и ПИ- регуляторы не могут упреждать ожидаемое отклонение регулируемой величины, реагируя только на уже имеющееся отклонение. Возникает необходимость в регуляторе, который вырабатывал бы дополнительное регулирующее воздействие, пропорциональное скорости отклонения регулируемой величины от заданного значения. Такое регулирующее воздействие используется в дифференциальных ПД- и ПИД-регуляторах.

Рис. 3.14.
ПД-регулятор. Это такой регулятор (рис. 3.15), у которого выходной сигнал р пропорционален входному сигналу о и производной do/ 5т, т.е.
где К - коэффициент усиления; T d

Рис. 3.15.
Производная dc/dx характеризует тенденцию изменения (отклонения) регулируемой величины. Величина и знак воздействия от производной позволяют регулятору как бы предвидеть, в какую сторону и насколько отклонилась бы регулируемая величина под действием данного возмущения. Это предвидение позволяет регулятору предварять своим воздействием возможное отклонение регулируемой величины. В результате процесс регулирования завершается в более короткое время. Сначала затвор скачком переходит из точки а в точку в (П-закон), т.е. больше, чем надо, затем отскакивает назад в точку б (дифференциальное действие) и остается в этом положении.
ПИД-регулятор. ПИД-регуляторы воздействуют на объект пропорционально отклонению регулируемой величины, интегралу от этого отклонения и скорости изменения регулируемой величины. ПИД-регулятор сочетает достоинства П-регулятора, И-регулятора, ПД-регулятора (рис. 3.16). Соответственно, в уравнении регулятора присутствуют три формулы законов регулирования:
где К - коэффициент пропорциональности; Г и - постоянная времени интегрирования; Т д - постоянная времени дифференцирования.
Эти параметры можно настроить вручную.
Параметрами настройки ПИД-регуляторов являются: коэффициент пропорциональности регулятора к р; постоянная времени интегрирования Г и; постоянная времени дифференцирования Т д.

Рис.
При скачкообразном изменении регулируемой величины ПИД- регулятор в начальный момент времени оказывает мгновенное бесконечно большое воздействие на объект регулирования, затем величина воздействия резко падает до значения, определяемого пропорциональной составляющей, после чего постепенно начинает оказывать влияние интегральная составляющая регулятора. Переходный процесс при этом (рис. 3.17-3.18) имеет минимальные отклонения по амплитуде и по времени. При наличии аналогового управляющего сигнала регулятор может иметь один или два дискретных сигнала для реализации функций сигнализации, защиты или других. Так, например, ПИД-регулятор температуры может формировать сигналы тревоги при выходе регулируемого параметра за указанные границы.

Рис. 3.17.

Рис. 3.18.
ПИД-закон используется во многих контроллерах. Сначала затвор скачком переходит из точки а в точку в (П-закон) (т.е. больше, чем надо), затем отскакивает назад в точку б (дифференциальное действие), а далее затвор медленно перемещается в конечное положение г (И-закон). В результате процесс регулирования завершается в более короткое время и с меньшей погрешностью регулирования.
Часто в системах автоматического регулирования циклических процессов требуется по определенной программе менять величину задания регулятора. Для этого используется программный задатчик. Параметрами оценки таких регуляторов являются число шагов программы, максимальная и минимальная длина шага программы, возможность плавного изменения задания на шаге.
Итак, рассмотрены идеальные характеристики линейных регуляторов. В реальности все происходит во времени (рис. 3.19).
В графиках нужно учитывать также запаздывание (чистое (транспортное) т 0 и емкостное запаздывание т е.

Рис. 3.19. ПИД-закон идеальный а и реальный б с учетом действия по времени
В частном случае пропорциональная, интегральная или дифференциальная компоненты могут отсутствовать и такие упрощенные регуляторы называют П, И или ПИ регуляторами.
Распространены также следующие модификации выражения (5.36):
| , | |
.jpg) . .
|
Между параметрами выражений (5.36) - (5.38) существует простая связь. Однако отсутствие общепринятой системы параметров часто приводит к путанице. Это нужно помнить при замене одного ПИД контроллера на другой, при задании его параметров или использовании программ настройки параметров. Мы будем пользоваться выражением (5.36).
Следует подчеркнуть, что входом объекта управления на всех рисунках является выход регулятора, т.е. величина u , которая в соответствии c (5.36)-(5.38) и рис. 5.34 имеет ту же размерность, что и рассогласование e , выходная величина y и уставка r . Т.е., если объект управляется, например, ШИМ-регулятором, током, или частотой вращения вала, во всех этих случаях управляющей величиной является u , а в модель объекта управления P следут ввести преобразователь величины u в ширину импульса ШИМ-регулятора, в ток или в частоту вращения вала соответственно. Это надо учитывать также при задании входного воздействия в экспериментах для настройки регулятора (см. раздел "Расчет параметров"). Таким воздействием во всех случаях должна быть величина u (выходная величина регулятора).
Используя преобразование Лапласа при нулевых начальных условиях u (0)=0 , выражение (5.36) можно представить в операторной форме:
Амплитудно-частотная и фазо-частотная характеристика передаточной функции (5.40) при параметрах =1 с, =1 с, =10 показаны на рис. 5.36 . Переходная характеристика ПИД-регулятора (реакция на единичный скачок) представляет собой сумму постоянной составляющей , прямой линии , полученной при интегрировании единичного скачка и дельта-функции Дирака , полученной при дифференцировании единичного скачка.
Рассмотрим теперь несколько частных случаев.
5.2.1. П-регулятор
Пусть интегральная и дифференциальная компоненты
отсутствуют, т.е. ![]() . Тогда из (5.40)
получим и (5.42) можно
преобразовать к виду
. Тогда из (5.40)
получим и (5.42) можно
преобразовать к виду
| . |
В установившемся режиме, при или передаточная функция процесса равна коэффициенту передачи . При этом выражение (5.43) преобразуется к виду
 . .
|
Как следует из полученной формулы, влияние возмущений d снижается с ростом петлевого усиления и при обратно пропорционально коэффициенту регулятора . Однако проблема устойчивости не позволяет выбирать как угодно большим.
Влияние помехи n также уменьшается с ростом петлевого усиления и пропорционального коэффициента регулятора. Дополнительно влияние помехи можно уменьшить применением экранирования, правильного заземления, витых пар, уменьшением длины проводников в цепи обратной связи и др., см. [Денисенко ]).
При пренебрежимо малых помехах и внешних возмущениях погрешность П-регулятора , как следует из (5.44), определяется величиной пропорционального коэффициента усиления:
 . .
|
Эта погрешность обычно не может быть сделана как угодно малой путем увеличения усиления регулятора, поскольку с ростом сначала падает запас по фазе и усилению системы с обратной связью, что ухудшает ее робастность и качество регулирования, затем возникают периодические колебания (система теряет устойчивость), см. рис. 5.37 . Поэтому в П-регуляторах для снижения погрешности используют метод компенсации. Для этого к входу объекта регулирования прикладывают компенсирующее воздействие , которое аддитивно добавляется к возмущению d , чтобы суммарное воздействие возмущения и компенсирующего воздействия стало равно . Отметим, что при изменении значения уставки компенсацию нужно выполнить заново, поскольку погрешность (5.45) пропорциональна (т.е. является мультипликативной), а компенсация в виде является аддитивной (не зависит от ).
Скомпенсировать погрешность можно также с помощью коррекции величины . Для этого управляющее воздействие после коррекции (обозначим его ), как следует из (5.44) и (5.45), должно иметь вид
 . .
|
|
|
|
Рис. 5.37. Изменение переменной во времени при подаче единичного скачка на вход системы при разных |

Переходный процесс в контуре с П-регулятором при и разных показан на рис. 5.37 . При малых система имеет малое перерегулирование, но большую статическую погрешность (50%). С ростом погрешность уменьшается, но возрастает перерегулирование.
Объясняется поведение П-регулятора следующим образом. С ростом усиления вся АЧХ разомкнутой системы (АЧХ петлевого усиления , рис. 5.19) сдвигается вверх, в том числе возрастает усиление на частоте , где фазовый сдвиг в контуре с обратной связью равен 180˚. Это приводит к уменьшению запаса по фазе и усилению, возрастает колебательность и перерегулирование. Если петлевое усиление на частоте достигает 1, в системе устанавливаются незатухающие колебания. Подробнее описание этого процесса см. в разделе "Частотная идентификация в режиме релейного регулирования"
5.2.2. И-регулятор
Рассмотрим теперь случай, когда в ПИД-регуляторе остается только интегральный член, т.е. и . Из (5.39) получим
АЧХ И-регулятора в логарифмическом масштабе представляет собой прямую линию с наклоном ‑20дб/дек во всем диапазоне частот, от 0 до , которая пересекает ось частот (проведенную при ) в точке . ФЧХ представляет собой горизонтальную линию с ординатой .
На низких частотах, при , коэффициент передачи регулятора (5.48) больше единицы и стремится к бесконечности при . Поскольку случаю во временной области соответствует , или установившийся (равновесный) режим для асимптотически устойчивых систем, то передаточная функция любого устойчивого объекта (за исключением объектов с интегрирующими процессами, см. раздел "Модели интегрирующих процессов") при будет равна статическому коэффициенту передачи . Поэтому, подставляя в (5.42) и , получим для системы с И-регулятором
| . |
Это означает, что система с И-регулятором не имеет ошибки в установившемся режиме.
Отметим аналогию между И-регулятором и операционным усилителем. Операционный усилитель (ОУ) имеет передаточную функцию вида , параметры которой для типовых микросхем ОУ равны , . Поэтому практически во всем рабочем диапазоне частот и передаточная функция ОУ описывается упрощенным выражением , т.е. совпадает с передаточной функцией И-регулятора. Схемы включения ОУ также подобны структурам систем управления с И-регулятором.
На рис. 5.38 показаны переходные характеристики замкнутой системы с И-регулятором и объектом второго порядка вида
|
|
При больших постоянных интегрирования переходная характеристика имеет вид, сходный с характеристикой апериодического звена. С уменьшением растет усиление регулятора в соответствии с (5.48) и когда на частоте петлевое усиление контура с обратной связью приближается к 1, в системе появляются колебания (рис. 5.38 , кривая ).
Вторым фактором, влияющим на устойчивость замкнутой системы, является дополнительный сдвиг фаз величиной -, вносимый И-регулятором в контур регулирования. Поэтому объект 1‑го порядка с малой транспортной задержкой, или объект 2-го порядка, устойчивый в контуре с П-регулятором, может потерять устойчивость в контуре с И-регулятором.
5.2.3. ПИ-регулятор
В ПИ-регуляторе только постоянная дифференцирования равна нулю, :
|
|
|
|
|
|
Рис. 5.39. Реакция замкнутой системы с ПИ регулятором на скачок при для объекта вида (5.50) при |
Рис. 5.40. Реакция замкнутой системы с ПИ регулятором на скачок при для объекта вида (5.50) при |


АЧХ ПИ-регулятора можно получить из рис. 5.36 , если отбросить правую ветвь АЧХ с наклоном +20 дБ/дек. При этом сдвиг фаз на частотах выше 1 Гц (на рис. 5.36) не превысит уровень 0˚. Таким образом, ПИ-регулятор имеет два существенных положительных отличия от И-регулятора: во-первых, его усиление на всех частотах не может стать меньше , следовательно, увеличивается динамическая точность регулирования, во-вторых, по сравнению с И-регулятором, он вносит дополнительный сдвиг фаз только в области низких частот, что увеличивает запас устойчивости замкнутой системы. Оба фактора дают дополнительные степени свободы для оптимизации качества регулирования. В то же время, как и в И-регуляторе, модуль коэффициента передачи регулятора с уменьшением частоты стремится к бесконечности, обеспечивая тем самым нулевую ошибку в установившемся режиме. Отсутствие сдвига фаз на высоких частотах позволяет увеличить скорость нарастания управляемой переменной (по сравнению с И-регулятором) без снижения запаса устойчивости. Однако это справедливо до тех пор, пока пропорциональный коэффициент не станет настолько большой, что увеличит усиление контура до единицы на частоте .
Переходный процесс в ПИ-регуляторе при разных сочетаниях и показан на рис. 5.39 , рис. 5.40 . При (рис. 5.39) получаем И-регулятор. С ростом пропорционального коэффициента появляется дополнительная ошибка во время переходного процесса (см. также рис. 5.37 и (5.45)), которая уменьшается с ростом , однако при этом снижается запас устойчивости системы, поскольку с ростом увеличивается усиление на частоте . Это приводит к появлению затухающих колебаний в начале переходного процесса (рис. 5.39). Когда величина становится достаточно большой для компенсации ослабления сигнала в объекте на частоте , в системе появляются незатухающие колебания. полюс
 ,
,
откуда следует, что на высоких частотах (в начале переходного процесса) ПД-регулятор имеет высокое усиление и, следовательно, точность, а в установившемся режиме (при ) он вырождается в П-регулятор со свойственной ему статической ошибкой. Если статическую ошибку скомпенсировать, как это делается в П-регуляторах, то возрастет ошибка в начале переходного процесса. Таким образом, ПД-регулятор по своим потребительским свойствам оказывается хуже П-регулятора, поэтому на практике он используется крайне редко. П-регулятор имеет только одно положительное свойство: он вносит в контур регулирования положительный фазовый сдвиг (рис. 5.36), что повышает запас устойчивости системы при малых . Однако с увеличением рис. 5.36), затем, при дальнейшем увеличении , система переходит в колебательный режим.
Открытие бизнеса

Где можно и где нельзя работать после туберкулеза Где можно работать после
Форекс
Направления повышения эффективности использования собственного капитала На базе двигателя с плоским печатным якорем разработаны изделия для автомобильной промышленности
Банки